第 4 回では、ベクトル値関数
r(t)
を使って、動く点の位置を表しました。
今回はその微分
r′(t)
が、図形的に何を意味しているのかをはっきりさせます。
ベクトル解析では、曲線の上で「どちら向きに進むのか」「どれくらい曲がっているのか」を考える場面が何度も出てきます。
その出発点になるのが、
です。
今回は、ベクトル値関数の微分を、単なる計算ではなく
曲線の上の向きと運動を表す量
として理解していきます。
1. 今回学ぶこと
この記事では、次の内容を扱います。
- 空間曲線
- 接線
- 接ベクトル
- 速度ベクトル
- 加速度ベクトル
ゴールは
ベクトル値関数の微分が、曲線の接する向きや運動の変化を表していることを理解すること
です。
2. 直感的なイメージ
第 4 回で見たように、
r(t)=x(t)y(t)z(t)
は、時刻 t における点の位置を表します。
このとき t を少しだけ動かすと、点は曲線に沿って少し移動します。
その「少し先への向き」を表しているのが接ベクトルです。
つまり
- r(t) は位置
- r′(t) はその位置での進行方向
と見ることができます。
さらに、r′(t) もまたベクトル値関数なので、その変化
r′′(t)
を考えることができます。
これが加速度ベクトルです。
したがって、この回で見たいのは
位置を微分すると速度になり、速度を微分すると加速度になる
という流れです。
3. 基本事項
3.1 空間曲線
ベクトル値関数
r(t)=x(t)y(t)z(t)
を考えます。
t を動かすと、点
P(t)=(x(t),y(t),z(t))
が空間内を動きます。
この点が描く軌跡を 空間曲線 といいます。
つまり空間曲線とは、ベクトル値関数によって表された点の運動の跡です。
第 3 回で直線を
r(t)=r0+td
のように表しましたが、あれは空間曲線の特別な場合になっています。
3.2 曲線の例
たとえば
r(t)=costsintt
を考えます。
このとき
- x(t)=cost
- y(t)=sint
- z(t)=t
です。
xy 平面への射影は単位円ですが、同時に z 座標が増えていくので、点は上に進みながら回転します。
したがって、この曲線はらせんの形になります。
この例からも分かるように、ベクトル値関数 1 本で
をまとめて表すことができます。
3.3 接ベクトル
曲線の上のある時刻 t を固定し、少し先の時刻 t+h を考えます。
このとき
r(t+h)−r(t)
は、点 P(t) から点 P(t+h) への移動ベクトルです。
h が十分小さければ、このベクトルは曲線の接する向きに近づいていきます。
そこで
r′(t)=h→0limhr(t+h)−r(t)
を、その点での 接ベクトル と考えます。
つまり接ベクトルとは、曲線の上でその瞬間にどちら向きへ進んでいるかを表すベクトルです。
3.4 接線
接ベクトル r′(t0) が 0 でないとき、点 P(t0) における接線は
x=r(t0)+sr′(t0)(s∈R)
で表されます。
これは第 3 回で見た直線の式
通る点 + 方向ベクトル
そのものです。
ここでは
- 通る点が r(t0)
- 方向ベクトルが r′(t0)
になっています。
したがって、接線は「その点を通り、接ベクトルの向きに伸びる直線」と考えればよいです。
3.5 速度ベクトル
点の運動として見ると、接ベクトル
r′(t)
は 速度ベクトル です。
なぜなら
hr(t+h)−r(t)
は単位時間あたりの位置の変化であり、その極限は瞬間的な変化率を表すからです。
速度ベクトルの向きは、運動の進行方向を表します。
また、その大きさ
∥r′(t)∥
は 速さ です。
つまり
- 速度ベクトル: 向きと大きさを持つ
- 速さ: その大きさだけを取り出した量
という違いがあります。
3.6 加速度ベクトル
速度ベクトルも時刻によって変化するので、さらに微分できます。
r′′(t)=dtdr′(t)
を 加速度ベクトル といいます。
加速度ベクトルは、速度の変化を表しています。
したがって、速さが変わるときだけでなく、向きが変わるときにも加速度は現れます。
たとえば等速円運動では速さは一定でも進行方向が変わるので、加速度ベクトルは 0 ではありません。
この点は、加速度を「速さの増減」だけでなく「速度全体の変化」として見るうえで重要です。
3.7 例: 円運動の速度と加速度
ベクトル値関数
r(t)=costsint0
を考えます。
成分ごとに微分すると
r′(t)=−sintcost0
です。
これは円に接する向きになっています。
さらにもう一度微分すると
r′′(t)=−cost−sint0=−r(t)
です。
つまり加速度ベクトルは常に中心向きで、点を円の内側へ引き戻す向きになっています。
この例は、
- 1 回微分すると接する向き
- 2 回微分すると向きの変化まで分かる
ことをよく表しています。
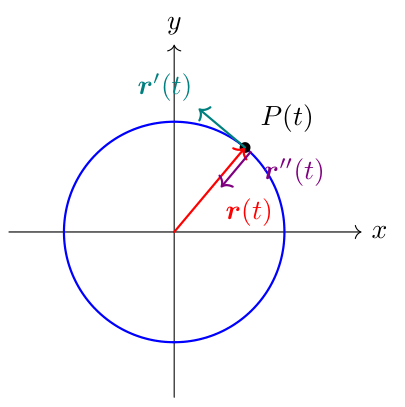
図では、赤い r(t) が点の位置を表し、緑の r′(t) は円に接する向き、紫の r′′(t) は中心向きになっています。
この 1 枚を見ると、位置を 1 回微分すると接する向きが現れ、さらに 1 回微分すると向きの変化まで表せることが分かります。
4. 例題
例題 1
r(t)=tt20
に対して、r′(t) を求めよ。
解答
成分ごとに微分して
r′(t)=12t0
です。
例題 2
r(t)=tt20
について、t=1 における接線の式を求めよ。
解答
まず
r(1)=110,r′(1)=120
です。
したがって接線は
x=110+s120(s∈R)
です。
例題 3
r(t)=costsint0
に対して、r′(t),r′′(t) を求めよ。
解答
1 回微分して
r′(t)=−sintcost0
さらに微分して
r′′(t)=−cost−sint0
です。
5. 練習問題
練習問題 1
r(t)=t2t31
の接ベクトル r′(t) を求めてください。
解答を見る
r′(t)=2t3t20
です。
練習問題 2
r(t)=tt20
について、t=0 における接線の式を求めてください。
解答を見る
r(0)=000,r′(0)=100
なので、
x=000+s100(s∈R)
です。
練習問題 3
r(t)=costsint0
の速さを求めてください。
解答を見る
まず
r′(t)=−sintcost0
です。
したがって速さは
∥r′(t)∥=sin2t+cos2t=1
です。
練習問題 4
r(t)=tsint0
に対して、加速度ベクトルを求めてください。
解答を見る
まず
r′(t)=1cost0
なので、さらに微分して
r′′(t)=0−sint0
です。
6. まとめ
今回は、ベクトル値関数の微分を曲線と運動の立場から見ました。
重要だったのは、
- r(t) が空間曲線を表す
- r′(t) は接ベクトルであり、運動として見れば速度ベクトルでもある
- その大きさ ∥r′(t)∥ は速さである
- r′′(t) は加速度ベクトルである
という点です。
つまり微分とは、単に成分を計算する操作ではなく、
曲線の上でどちら向きに進み、どう変化していくかを取り出す道具
だと見ることができます。
次回は、この微分の考え方を多変数関数に広げて、
を扱います。
ここからいよいよ、ナブラ
∇
が登場します。