第 1 回ではベクトルそのものを整理し、第 2 回では内積と外積、第 3 回では直線と平面を見ました。
今回はその次の段階として、
ベクトルが変化するとはどういうことか
を扱います。
これまでのベクトルは、1 つ固定された量として見ていました。
しかしベクトル解析では、位置や時間に応じてベクトルが変わる状況を考えることが非常に多いです。
たとえば、時刻 t によって空間内の点が動くなら、その位置は
r(t)=x(t)y(t)z(t)
のように表されます。
このような「実数を入れるとベクトルが返ってくる関数」が ベクトル値関数 です。
ここをきちんと理解しておくと、次回扱う接ベクトル、速度ベクトル、加速度ベクトルが自然につながります。
1. 今回学ぶこと
この記事では、次の内容を扱います。
- ベクトル値関数の定義
- ベクトル値関数の極限
- ベクトル値関数の連続
- ベクトル値関数の微分
ゴールは
動く点をベクトルで表し、その変化を極限と微分で扱えるようにすること
です。
2. 直感的なイメージ
これまでの
a=a1a2a3
のようなベクトルは、1 つの固定された点や向きを表していました。
一方でベクトル値関数
r(t)
では、t が変わるたびにベクトルそのものが変わります。
これは、空間の中を動く点の位置を時刻ごとに記録していると考えると分かりやすいです。
つまりベクトル値関数とは、
点の運動を、位置ベクトルの変化として書いたもの
です。
この見方を持つと、
- r(t) は時刻 t の位置
- r′(t) はその変化のしかた
という対応が自然に見えてきます。
3. 基本事項
3.1 ベクトル値関数の定義
実数 t に対してベクトルを対応させる関数
r(t)
を ベクトル値関数 といいます。
3 次元では通常、
r(t)=x(t)y(t)z(t)
の形で表します。
ここで x(t),y(t),z(t) はそれぞれ実数値関数です。
つまりベクトル値関数とは、成分ごとに見れば
- x 座標がどう変わるか
- y 座標がどう変わるか
- z 座標がどう変わるか
を同時にまとめたものです。
このとき、各 t に対して
r(t)=OP(t)
と見れば、r(t) は点 P(t) の位置ベクトルを表しています。
したがって、ベクトル値関数を考えることは、動く点を考えることとほとんど同じです。
3.2 例: 円運動
たとえば
r(t)=costsint0
を考えます。
このとき
- x(t)=cost
- y(t)=sint
- z(t)=0
です。
したがって点 P(t) は xy 平面上を動き、常に
x(t)2+y(t)2=1
を満たします。
つまりこのベクトル値関数は、単位円上の運動を表しています。
ここで大事なのは、式
r(t)=costsint0
だけで、
が同時に記述できていることです。
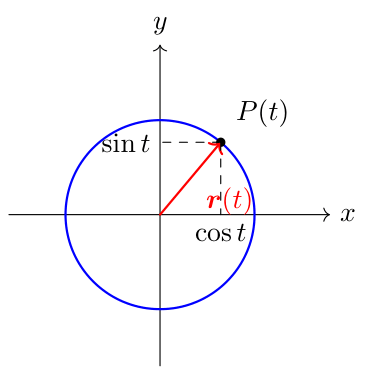
図のように、点 P(t) は単位円の上にあり、赤い位置ベクトル r(t) の先端がそのまま点の位置を表しています。
したがって r(t)=costsint0 という式は、座標と運動の両方を同時に記述していることが分かります。
3.3 ベクトル値関数の極限
ベクトル値関数の極限は、成分ごとに定義します。
r(t)=x(t)y(t)z(t)
に対して、
t→t0limr(t)=abc
とは、
t→t0limx(t)=a,t→t0limy(t)=b,t→t0limz(t)=c
がすべて成り立つことをいいます。
つまりベクトル全体の極限といっても、実際には各成分の極限をまとめて見ているだけです。
第 1 回で、ベクトルの距離を
d(a,b)=∥a−b∥
で定めました。
ベクトル値関数の極限とは、t が t0 に近づくときに r(t) とあるベクトルとの距離が 0 に近づくことだと考えてもよいです。
3.4 連続
ベクトル値関数 r(t) が t=t0 で 連続 であるとは、
t→t0limr(t)=r(t0)
が成り立つことです。
これも成分ごとに言い換えれば、
x(t), y(t), z(t)
がそれぞれ t0 で連続であることと同値です。
したがって、ベクトル値関数の連続性は難しく見えても、本質的には実数値関数の連続性をそのまま各成分に適用しているだけです。
図形的には、連続なベクトル値関数は途中で飛ばずに曲線をたどる、と考えるとよいです。
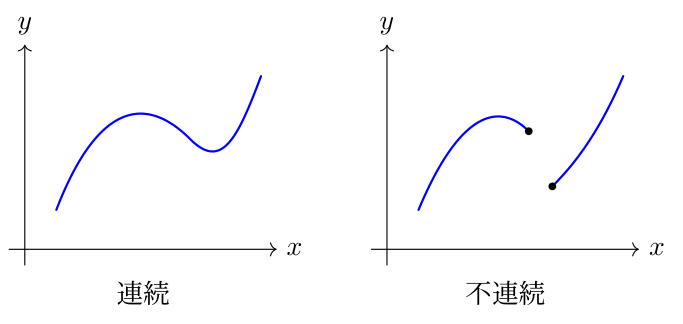
図の左側のように軌跡が途中で切れずにつながっていれば連続です。
一方、右側のように途中で飛んでしまうと、その点では連続ではありません。
3.5 ベクトル値関数の微分
ベクトル値関数の微分も、極限を使って
r′(t)=h→0limhr(t+h)−r(t)
で定義します。
ここで
r(t+h)−r(t)
は、時刻 t から t+h のあいだにどれだけ位置が変わったかを表すベクトルです。
したがって
hr(t+h)−r(t)
は、単位時間あたりの変化、つまり平均の変化率を表しています。
その極限を取ったものが r′(t) です。
これは第 1 回や第 3 回で見た「ベクトルの差」と「位置の変化」を、そのまま関数に持ち込んだ形になっています。
3.6 微分は成分ごとに計算できる
ベクトル値関数の微分は、実際には成分ごとに微分すればよいです。
r(t)=x(t)y(t)z(t)
なら
r′(t)=x′(t)y′(t)z′(t)
です。
これは極限を成分ごとに取れることから従います。
たとえば
r(t)=tt2sint
なら
r′(t)=12tcost
です。
この「成分ごとに微分する」という見方は、この先ずっと使います。
3.7 微分の図形的意味
ベクトル値関数の微分 r′(t) は、曲線に沿った変化の向きを表します。
特に、r(t) が点の運動を表しているとき、r′(t) は速度ベクトルです。
つまり
- 向きは、その瞬間にどちらへ進もうとしているか
- 大きさは、その瞬間の速さ
を表しています。
したがって、r′(t) は次回扱う 接ベクトル の出発点になります。
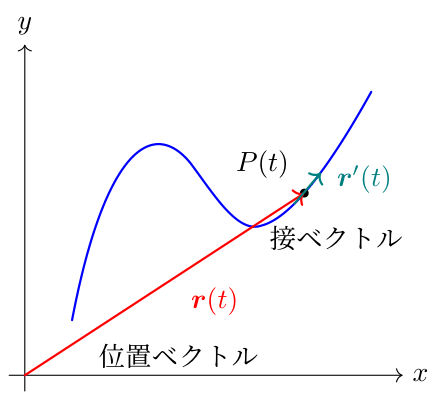
図では、赤い r(t) が点 P(t) の位置を表し、その点に接する向きに r′(t) が描かれています。
つまり微分ベクトルは、曲線の上でその瞬間にどちら向きへ進むかを表していると見ればよいです。
4. 例題
例題 1
ベクトル値関数
r(t)=t22t1
に対して、r(1) を求めよ。
解答
各成分に t=1 を代入すればよいので、
r(1)=121
です。
例題 2
r(t)=tt2t3
の導関数 r′(t) を求めよ。
解答
成分ごとに微分して
r′(t)=12t3t2
です。
例題 3
r(t)=costsint0
が単位円上の運動を表すことを確かめよ。
解答
x(t)=cost, y(t)=sint なので
x(t)2+y(t)2=cos2t+sin2t=1
です。
したがって点 P(t) は常に単位円
x2+y2=1
の上にあります。
5. 練習問題
練習問題 1
r(t)=2t1−t3
に対して、r(2) を求めてください。
解答を見る
r(2)=4−13
です。
練習問題 2
r(t)=t3t2t
の導関数を求めてください。
解答を見る
成分ごとに微分して
r′(t)=3t22t1
です。
練習問題 3
r(t)=1+t1t+10
について、t→0 のときの極限を求めてください。
解答を見る
成分ごとに極限を取ればよいので、
t→0limr(t)=110
です。
練習問題 4
r(t)=t∣t∣0
は t=0 で微分可能ですか。
解答を見る
第 2 成分 ∣t∣ が t=0 で微分可能でないので、r(t) も t=0 で微分可能ではありません。
ベクトル値関数の微分可能性も、成分ごとに見ればよいことが分かります。
6. まとめ
ベクトル値関数は、
r(t)=x(t)y(t)z(t)
のように、実数を入れるとベクトルが返る関数でした。
重要なのは、
- 動く点を位置ベクトルとして表せる
- 極限と連続は成分ごとに考えればよい
- 微分も成分ごとに計算できる
- 微分 r′(t) は変化の向きと速さを表す
という点です。
特に、ベクトル値関数の微分によって
曲線の上で、どちら向きにどれだけ変化しているか
を記述できるようになります。
次回はこの考え方をそのまま使って、
- 空間曲線
- 接ベクトル
- 速度ベクトル
- 加速度ベクトル
を扱います。
今回の内容が、そのまま第 5 回の土台になります。