今回は、今までの単発の記事よりも少し腰を据えて、全 12 回の講座 という形で進めていきます。
この講座では、ベクトル解析を次の流れで見ていきます。
ベクトル → ベクトル関数 → 勾配 → 発散 → 回転 → 積分 → ガウス・ストークス
この第 1 回では、ベクトル解析で扱うベクトルについて、定義や考え方をしっかり見ていきます。
高校でもベクトルは出てきますが、ベクトル解析ではベクトルを
- 図形の道具
- 空間内の点や移動を表す記述
- 関数や場を作るための基本単位
として使います。
つまり、ただ計算ができればよいというより、
ベクトルを空間の中の対象としてどう見るか
が重要になります。
この記事では、その立場からベクトルを整理し直します。
1. 今回学ぶこと
この記事では、次の内容を扱います。
- ベクトル解析でいうベクトルの意味
- R2、R3 のベクトル
- ノルム
- 零ベクトルと単位ベクトル
- 位置ベクトル
- 線形結合
ゴールは
ベクトルを、図形と成分の両方から理解し、ベクトル解析の出発点として使えるようにすること
です。
2. 直感的なイメージ
ベクトル解析では、空間の中にあるものをたくさんベクトルで表します。
たとえば、
- 点の位置
- 点の移動
- 速度
- 力
- 曲線に沿った接線方向
などです。
このときベクトルは、単なる「矢印の図」ではなく、
空間の中で向きと大きさをもつ量を表す記号
として使われます。
さらにあとで出てくるベクトル値関数
r(t)=x(t)y(t)z(t)
やベクトル場
F(x,y,z)
も、結局は「各点でベクトルがどう与えられるか」を扱っています。
なので第 1 回では、ベクトルを高校の復習として軽く流すのではなく、
この先ずっと使う基本言語
として整えておく必要があります。
3. 基本事項
3.1 ベクトル解析でいうベクトル
ベクトル解析では、まず 2 次元や 3 次元の実数空間を考えます。
2 次元なら
R2={(xy)x,y∈R}
3 次元なら
R3=⎩⎨⎧xyzx,y,z∈R⎭⎬⎫
です。
ベクトル解析でいうベクトルとは、基本的にはこれらの空間の元です。
つまり 2 次元では
a=(a1a2)
3 次元では
a=a1a2a3
のような実数の組をベクトルとして扱います。
ここで大事なのは、
ベクトルは「数の組」であると同時に、「空間の中の向きと大きさ」を表している
ということです。
この 2 つの見方を行き来しながら考えるのが、ベクトル解析の基本です。
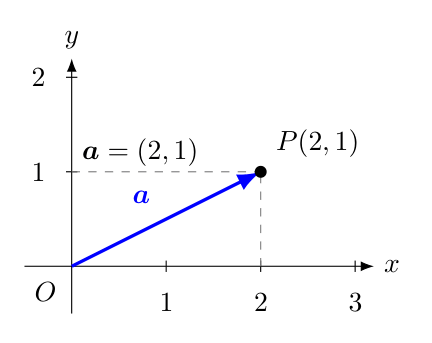
図のように、同じ (2,1) という情報が、点としても、原点からその点へ向かうベクトルとしても見られます。
この「座標の組」と「向きと大きさ」を対応させる見方が、ベクトル解析の出発点です。
3.2 ベクトルの表記
本講座では、ベクトルを
a,b,r
のように太字で表します。
また、表記は
- 点は (x,y,z) のような丸括弧
- ベクトルは xyz のような列ベクトル
で統一していきます。
これは、点とベクトルを見分けやすくするためです。
特に
r=xyz
は位置ベクトルを表す記号として頻繁に登場します。
3.3 ベクトルの和と実数倍
ベクトル空間としてまず必要なのは、ベクトルどうしを足せることと、実数倍できることです。
a=a1a2a3,b=b1b2b3
に対して、
a+b=a1+b1a2+b2a3+b3
と定めます。
また、実数 c に対して
ca=ca1ca2ca3
と定めます。
これは単なる計算規則ではありません。
- 和は移動の合成
- 実数倍は長さの拡大縮小と向きの反転
を表しています。
たとえば 2a は a と同じ向きで長さが 2 倍のベクトルであり、
−a は長さは同じで向きが逆のベクトルです。
3.4 線形結合
ベクトル解析では、ベクトルの和と実数倍を組み合わせた
c1a1+c2a2+⋯+cnan
という形を何度も使います。
これを 線形結合 といいます。
ここで
e1,e2,e3
のようなベクトルは、座標軸方向を表す基本ベクトルであり、標準基底 と呼ばれます。
たとえば 2 次元では、
e1=(10),e2=(01)
を使うと、任意のベクトル
(xy)
は
(xy)=xe1+ye2
と書けます。
3 次元でも
e1=100,e2=010,e3=001
を使って
xyz=xe1+ye2+ze3
と書けます。
この見方はとても重要です。
なぜなら、空間内のベクトルが「基本ベクトルの組み合わせ」として表せることが、そのまま成分表示の意味だからです。
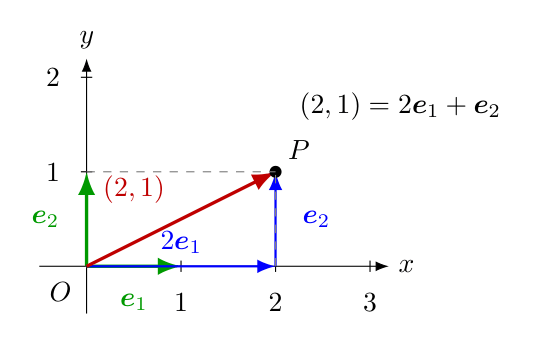
図では、まず e1 方向に 2 だけ進み、次に e2 方向に 1 だけ進むことで
(21)
ができています。
つまり成分表示とは、標準基底を何倍ずつ足したかを表しているわけです。
3.5 ノルム
ベクトルの大きさを測る量を ノルム といいます。
ベクトル解析で最も基本になるのはユークリッドノルムで、
a=a1a2a3
に対して
∥a∥=a12+a22+a32
と定めます。
2 次元なら
∥a∥=a12+a22
です。
高校では絶対値記号 ∣a∣ で書くことも多いですが、大学以降は数の絶対値と区別して
∥a∥
と書くことがよくあります。
この記法は今後の講座でも使っていきます。
ノルムは単に長さを表すだけでなく、
- ベクトルが 0 に近いか
- 単位ベクトルになっているか
- 距離がどれくらいか
を判断する基準になります。
実際、2 つのベクトル a,b の距離は
d(a,b)=∥a−b∥
で定義されます。
この距離の考え方は、後で極限や連続を定義するときに重要になります。
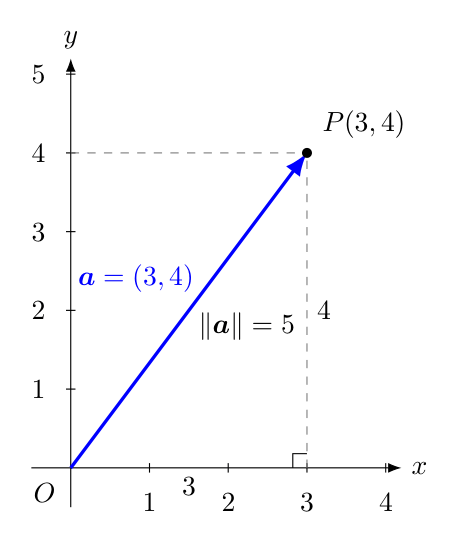
図の直角三角形を見ると、ベクトル
(34)
の長さが、横 3、縦 4 の三平方で求まることが分かります。
ノルムは、まさにこの斜辺の長さです。
3.6 零ベクトルと単位ベクトル
0=(00)
や
0=000
のようなベクトルを 零ベクトル といいます。
零ベクトルは長さ 0 のベクトルで、向きを持ちません。
また、ノルムが 1 のベクトルを 単位ベクトル といいます。
ベクトル a=0 に対して
∥a∥a
は a と同じ向きの単位ベクトルです。
たとえば
a=(34)
なら
∥a∥=5,∥a∥a=(5354)
です。
単位ベクトルが重要なのは、向きを長さから切り離して扱えるからです。
このあと内積を使って角度を考えるときも、勾配の向きを考えるときも、線積分で接線方向をそろえるときも、単位ベクトルは基本になります。
3.7 位置ベクトル
ベクトル解析では、点 P=(x,y,z) をそのまま扱うよりも、
原点 O から点 P へ向かうベクトル
OP
で考えることが多くなります。
これを 位置ベクトル といいます。
位置ベクトルを使うと、点を
空間内の場所
としてではなく、
原点からどのように到達するか
として記述できます。
たとえば
P=(2,−1,3)
なら、その位置ベクトルは
OP=2−13
です。
この見方を使うと、2 点 A,B に対して
AB=OB−OA
と書けます。
つまり「点から点への移動」が、位置ベクトルの差として表されます。
これは後で曲線
r(t)
を考えるときに、そのまま
時刻 t における点の位置
を表す形につながります。
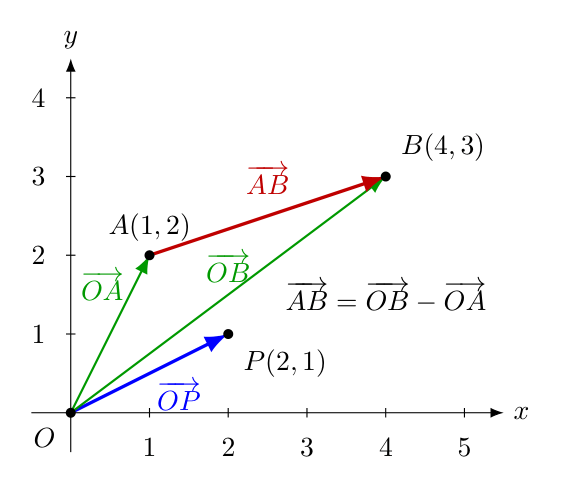
図の OP は、点 P の位置そのものを表しています。
また、AB は 2 点 A,B の位置ベクトルの差として表されており、「どこからどこへ動いたか」が差で書けることも読み取れます。
3.8 ベクトルは点ではない
ここで 1 つ注意があります。
成分表示が同じなので、
P=(2,1),OP=(21)
を同じもののように見てしまいがちです。
実際、座標としては同じ数字が並びます。
しかし意味は違います。
- P=(2,1) は点
- OP=(21) はベクトル
です。
点は「場所」であり、ベクトルは「向きと大きさをもつ量」です。
ただし位置ベクトルを使うことで、点をベクトルとして扱えるようになるので、計算上はとても便利になります。
ベクトル解析では、この区別と対応を意識しておくことが重要です。
4. 例題
例題 1
a=2−13
について、次を求めよ。
- ∥a∥
- a と同じ向きの単位ベクトル
- a を e1,e2,e3 の線形結合で表した式
解答
まず
∥a∥=22+(−1)2+32=14
です。
したがって単位ベクトルは
∥a∥a=1412−13
です。
また、
e1=100,e2=010,e3=001
なので
a=2e1−e2+3e3
と書けます。
例題 2
点
A=(1,2,−1),B=(3,−1,4)
に対して、AB を求めよ。
解答
位置ベクトルを使うと
OA=12−1,OB=3−14
なので
AB=OB−OA=3−14−12−1=2−35
です。
ここで見えているのは、点と点の差が移動ベクトルになっているということです。
5. 練習問題
練習問題 1
a=122
のノルムを求めてください。
解答を見る
∥a∥=12+22+22=9=3
です。
練習問題 2
a=−212
と同じ向きの単位ベクトルを求めてください。
解答を見る
まず
∥a∥=(−2)2+12+22=9=3
なので、同じ向きの単位ベクトルは
∥a∥a=−323132
です。
練習問題 3
3−24
を e1,e2,e3 の線形結合で表してください。
解答を見る
3−24=3e1−2e2+4e3
です。
練習問題 4
点
A=(2,0,1),B=(−1,3,5)
に対して、AB を求めてください。
解答を見る
AB=OB−OA=−135−201=−334
です。
練習問題 5
なぜ零ベクトルには向きがないと考えるのか、自分の言葉で説明してみてください。
解答を見る
零ベクトルは長さが 0 なので、「どちらへ向いているか」を区別する情報を持ちません。
向きだけを変えたとしても同じ零ベクトルのままなので、向きは定まらないと考えます。
6. まとめ
ベクトル解析でいうベクトルは、R2 や R3 の元として与えられる実数の組です。
ただし、それは単なる数の並びではなく、
空間の中の向きと大きさをもつ量
として理解されます。
今回見たポイントをまとめると、
- ベクトルは和と実数倍ができる
- ベクトルは線形結合で表せる
- ノルムはベクトルの大きさを与える
- 零ベクトルと単位ベクトルは基本的な特別例である
- 位置ベクトルによって点をベクトルとして扱える
- 点の差は移動ベクトルになる
ということでした。
ベクトル解析では、曲線は位置ベクトル
r(t)
で表され、勾配・発散・回転はベクトルを使って定義されます。
そのため、今回学んだ
は、今後のすべての内容の土台になります。
この見方を持っておくと、次回の内積と外積も「ただの公式」ではなく、ベクトルどうしの関係を測る道具として理解しやすくなります。
次回は、ベクトルの長さや向きだけでなく、
- 2 つのベクトルがどれくらい同じ向きを向いているか
- 2 つのベクトルがどれくらい広がりを作るか
を見るために、内積と外積 を扱います。